Bisher war es so, dass eine Hand, wohl oft mit dem Zeigefinger am Schalter, den Motor gestartet hat. Nun soll aber das Starten und Stoppen durch ein Computerprogramm erledigt werden. Also muss es eine Computerhand geben, die am Schalter dies erledigt.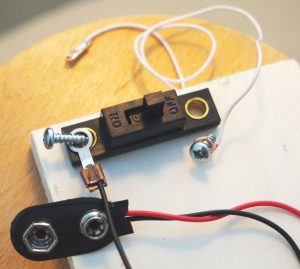 Hier geht es um wichtige Programmierungen und um ein kleines elektronisches Bauteil, das auch selbst gelötet werden kann. Das Programmieren kann wieder wie bei der Hupe mit LED-Lämpchen geübt werden. Die Programme, die bei der Hupe verwendet wurden waren ja eine Vorbereitung für die Programmierung und können genau so hier für das Fahren wendet werden. Es ist auch zu beachten, dass der hier folgende Schritt eine Vertiefung der Kenntnisse geht die beim Programmieren der Hupe erworben wurde. Das aufeinander Aufbauende muss beachtet werden und die damit verbundene Erweiterung der Hardware eröffnen dann sehr schnell interessante Spiel- und Experimentier- Situationen.
Hier geht es um wichtige Programmierungen und um ein kleines elektronisches Bauteil, das auch selbst gelötet werden kann. Das Programmieren kann wieder wie bei der Hupe mit LED-Lämpchen geübt werden. Die Programme, die bei der Hupe verwendet wurden waren ja eine Vorbereitung für die Programmierung und können genau so hier für das Fahren wendet werden. Es ist auch zu beachten, dass der hier folgende Schritt eine Vertiefung der Kenntnisse geht die beim Programmieren der Hupe erworben wurde. Das aufeinander Aufbauende muss beachtet werden und die damit verbundene Erweiterung der Hardware eröffnen dann sehr schnell interessante Spiel- und Experimentier- Situationen.
Bitte beachten!! In der Arbeit mit den Kindern muss der Stufen-Aufbau der Methode „RoboBumpCar“ sehr streng eingehalten werden. Nur so kann sich der Lernerfolg einstellen.
Daher müssen die Kinder an dieser Stelle die notwendigen Symbole in der Programmierung bereits kennengelernt haben. D.h. In der Einsteigsphase haben sie das Blinken und Hupen in der Fahrt ihres Wagens schon angewendet!
So sind diese Symbolbilder als Werkzeuge des Programmierens schon bekannt und werden jetzt vertieft angewendet.
Nun zum technischen Grundprinzip, was muss der pädagogische Anleiter beachten:
- Die Kinder oder Jugendlichen müssen den Stromkreis und einen einfachen Schaltplan mit den Symbolen Stromquelle, Schalter, Motor beim Bau des Fahrzeugs kennen lernen.
- Oft ist es besser, nicht mit der Betrachtung von Schaltplänen zu beginnen, sondern die einzelnen Bauteile zu betrachten und in der Hand zu halten. Es kann auch sinnvoll sein, das neue Bauteil nicht zu erklären sondern mit dem praktischen Einbau zu beginnen und die Wirkungsweise praktisch zu erleben. Im Seminar haben wir erlebt, dass es gut ist, mit dem fertigen Einbau des Bauteils eine Schema-Zeichnung ( Batterie-Arduino-Motortreiber-Motor) gemeinsam zu entwickeln.
- Je nach Lerngruppe muss man entscheiden wie vorgegangen wird. Das neue Bauteil (engl.Motorshield oder Motortreiber) wird im Austausch anstelle des Schalters eingebaut.
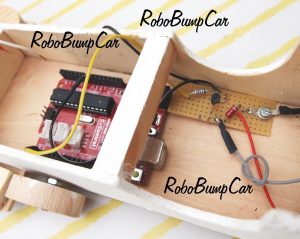
- Wichtig ist, dass verstanden wird, das neue Bauteil, der Motortreiber, den Schalter ersetzt. Daher wird der Schalter ausgebaut und an dieser Stelle die Treiber-Platine eingesetzt, siehe Abbildung.
Kinder, die mit Robobumpcar lernen, spielen, forschen und erfinden sollen, um für die Zukunft vorbereitet zu sein, benötigen Ausgebildete, kompetente Begleitung. Trainer für das Robobumpcar-Bauen. Hier ist zu sehen, wie die kleine Elektronik, ein Motorshield selbst gebaut und in das Fahrzeug eingesetzt wird.

Hier geht es zu Seite: 5.Rolands RoboBumpCar (RBC) bekommt den ersten Sensor!