 Bisher habe wir alles programmiert was von innen nach außen wirken soll. Vom Programm im Mikrocontroller geht das Signal „jetzt Hupen“ zur Hupe, das Signal „Motor stop“ vom Mikrocontroller zum Motor. Nun soll ein Signal von außen zum Mikrocontroller gehen und zu einer Wirkung im Programmablauf führen. Robobumpcar bekommt dafür einen „Fühler“. Der einfachste Fühler, den das
Bisher habe wir alles programmiert was von innen nach außen wirken soll. Vom Programm im Mikrocontroller geht das Signal „jetzt Hupen“ zur Hupe, das Signal „Motor stop“ vom Mikrocontroller zum Motor. Nun soll ein Signal von außen zum Mikrocontroller gehen und zu einer Wirkung im Programmablauf führen. Robobumpcar bekommt dafür einen „Fühler“. Der einfachste Fühler, den das

Fahrzeug haben kann, ist ein Schalter. Die Abbildung zeigt eine kleine Holzkonstruktion, die mit zwei Schrauben über dem Bumper befestigt wird und über das Bugrad des Bumpers um ein oder zwei mm hinausragt. Trifft das Fahrzeug rechtwinklig auf eine Wand der Bahn, wird der Schalter betätigt. Natürlich ist die Abfrage eines Sensors, wie dieser Schalter, schon eine etwas anspruchsvollere Programmieraufgabe. Es ist aber auch sinnvoll diese kleine Holzarbeit schon beim einfachen Programmieren von Blinker und Hupe einzusetzen. Da kann man mit dem Schalter den Reset auslösen! Ohne das Programm zu erweitern kann der Schalter dann das Hupen- und Blink-Programm immer dann neu starten, wenn der Wagen ein Hindernis direkt anfährt.
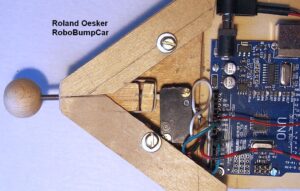
Hier mit dem Bild 2 wird eine weit aufwendigere Holzarbeit gezeigt. Eine Holzkugel an einem Metallstab bewegt eine kleine Druckplatte. Diese betätigt den Schalter wenn die Kugel das Hindernis berührt. Kinder oder Jugendliche, die schon eine etwas größere Werkerfahrung haben finden hier ein weites Feld der Erforschung und experimenteller Problemlösung. Hier muss entschieden werden, ob ein leicht zu erreichendes Erfolgserlebnis benötigt wird oder ob eine Motivation zum Tüfteln und Knobeln an der Aufgabe vorhanden ist. Für beide Wege gibt es
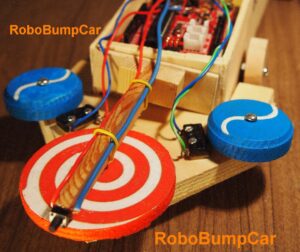
geeignetes Material in der Ergänzugspackung „Der erste Sensor für den RoboBumpCar“. Mit wenigen Handgriffen werden die Rollen des Bumpers mit weiteren Schaltern ausgestattet. (Bild 3, Bumper mit 3 Sensorschaltern). Dann sind 3 Sensoren dafür zuständig, dass das Berühren mit Hindernissen rechts und links des Fahrzeugs und Berührungen an der Spitze des Bumpers erfasst werden.


Hier zwei Bilder aus der Werkstatt für Robobumpcar-Trainerinnen. Programmierung und Verbesserungen am Fahrzeug benötigen immer das Experimentieren in der Bahn. Dann kann es gelingen das ein Fahrzeug auf dem Weg durch die Bahn allen Hindernissen ausweichen kann.
Hier geht es zu Seite: 6. Ein Auge für RoboBumpCar (RBC)!