RoboBumpCar hat nun einen Fühler um beim Zusammenprall mit einem Hindernis den Motor zu stoppen und mit der Hupe ordentlich laut zu hupen. Mit einem Auge könnte RoboBumpCar doch schon vor dem Zusammenprall den Motor stoppen und laut Hupen! Das einfachste „Auge“ (Bild 1) für den

RoboBumpCar ist ein licht- empfindlicher Widerstand, auch genannt Fotowiderstand (LDR). Die Abkürzung steht international für Light Dependent Resistor. Damit kann auch ein Hindernis erkannt werden und das Fahrzeug kann mit einem Lichtsignal gestoppt oder gestartet werden.
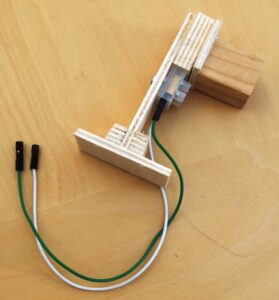
Dabei ist es nützlich den LDR so einzubauen, dass nur ein gezielter Lichtstrahl erfasst wird. Bild 2 und 3 zeigen einensolchen Einbau, der leicht an einem RoboBumpCar angeschraubt werden kann.
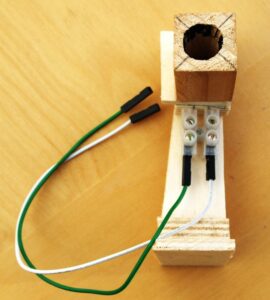
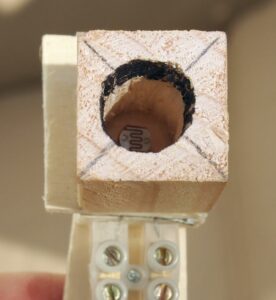
Bild 4 Zeigt den LDR in der Holzbohrung vor Fremdlicht und Streulicht abgeschattet. Das Licht einer Taschenlampe kann aber den Lichtsensor LDR gut erreichen.

Der Einbau zur des LDR ist notwendig um eine eindeutige Schaltung zu erreichen. Raumlicht beeinflusst das Schalten, wenn eine solcher Abschattung fehlt. Einbau muss nicht so aufwendig sein. Bild 5 zeigt die Verwendung einer Röhre aus schwarzer Pappe.
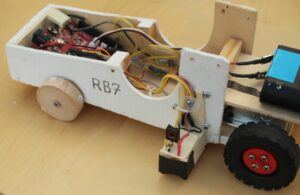
Bild 6 zeigt den Anbau des LDR an der Seite des Fahrzeugs. So ist der Lichtsensor LDR auf die Fahrbahn gerichtet. Wenn der Robobumpcar auf einem hellen Boden fährt, kann eine dunkle Markierung am Boden das Fahrzeug stoppen.
RBC erhält informationen durch das Sensor-Auge von der Fahrbahn.
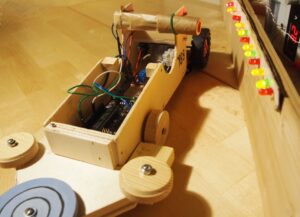
Bild 7 zeigt einen LDR-Lichtsensor der auf den Rand, die Bande der Fahrbahn gerichtet ist. Das Lichtsignal kann den RoboBumpCar anhalten oder weiterfahren lassen, die Hupe im Fahrzeug betätigen oder Musik aus dem Lautsprecher des Fahrzeugs erklingen lassen. Je nach dem, wie der Arduino im Fahrzeug und wie der Arduino der zur Bahn gehört, programmiert wurde. Die Bahn hat ja auch einen Arduino und ist mit einer „Verkehrsbeeinflussung“ programmiert, die auf die Fahrzeuge in der Bahn wirkt. So kann ein RBC die „Verkehrssituation“ und „Verkehrszeichen“ verstehen, als würde ein Fahrer im RoboBumpCar sitzen!

Das Sensor-Auge als berührungsloser Abstandsmesser!
Der lichtempfindliche Sensor kann auch als Abstandsbumper eingesetzt werden. Dafür bekommt das Fahrzeug einen kleinen Scheinwerfer! Das Hindernis, vor dem der Robobumpcar anhalten soll, wird mit einem silbernen Reflektor ausgestattet. So wird das Licht des Scheinwerfers in einem bestimmten Abstand auf das Sensorauge gespiegelt und das Fahrzeug hält mit einem Abstand an! Hier geht es zu Seite: 7. Polizeisirene und schöne Töne